

{kind=link}
Scientists have developed a lizard-like quadruped robot capable of climbing flat walls using an effective and straightforward mechanism. This innovative robot can easily adhere to rough vertical surfaces, showcasing a significant advancement in robotic mobility.
Innovative Microspine Technology for Rough Surfaces
While some experimental robots use suction-based gripping systems to climb smooth surfaces, these technologies fail on rough terrains like rocks. To overcome this limitation, researchers have created a mechanism called microspine grippers. These grippers consist of a series of tiny, sharp hooks that latch onto small protrusions and indentations on the climbing surface. When the gripper is lifted for the next step, the hooks release from the surface.
Passive vs. Active Microspine Grippers
Passive microspine grippers rely on the weight of the robot’s suspended body to maintain grip, making them effective on relatively flat walls. However, they struggle on irregular surfaces like rocks, which require more varied climbing strategies. Active microspine grippers, on the other hand, use electric actuators to deliberately embed a set of hooks into the surface, providing a motorized grip in all directions. Despite their effectiveness, these active grippers are bulky, mechanically complex, consume a lot of energy, and climb slowly.
Introducing LORIS: Lightweight Observation Robot for Irregular Slopes
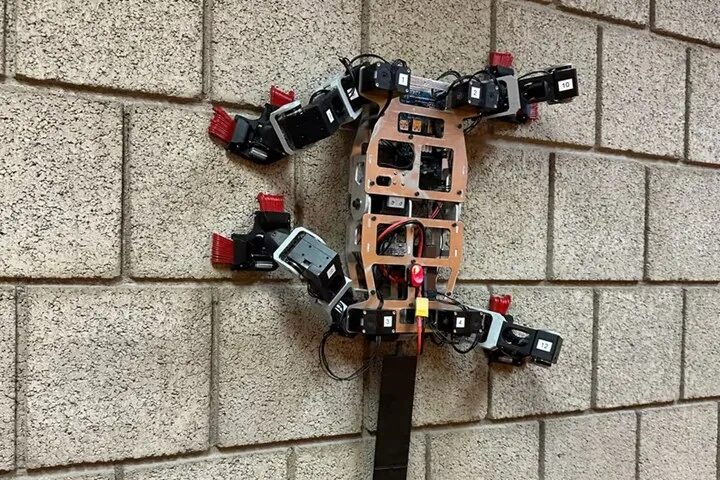
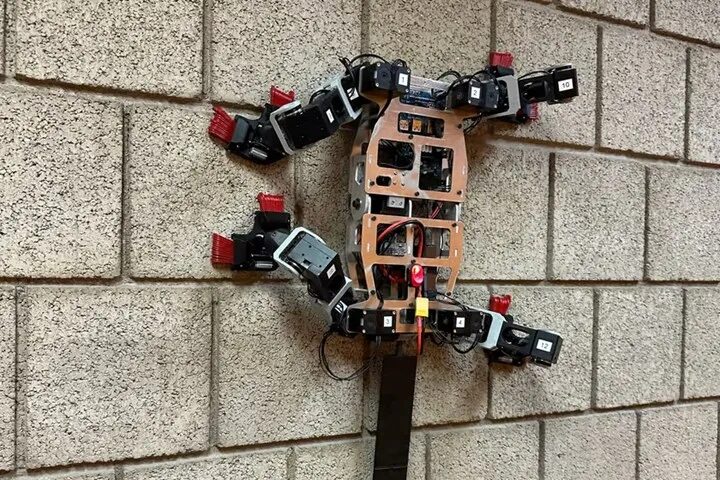
Developed by researchers at Carnegie Mellon University’s Robomechanics Lab, LORIS combines the strengths of both passive and active microspine grippers. Each of LORIS’s four legs ends with a wide microspine gripper featuring two groups of spines arranged at right angles. These grippers are attached to the legs via passive wrist joints, allowing the grippers to swing freely in response to the leg’s movements.
Bio-Inspired Climbing Strategy
Drawing inspiration from insects, LORIS uses an integrated depth-sensing camera and microprocessor to coordinate its movements. When a gripper on one leg latches onto the climbing surface, the opposite leg’s gripper follows suit, ensuring two diagonal legs maintain tension and a secure hold on the surface. This frees the other two legs to take the next step upward. This technique, known as directed inward gripping, mimics climbing strategies observed in insects.
Advantages of LORIS
According to the researchers, LORIS combines the light weight, speed, energy efficiency, and simplicity of passive microspine grippers with the robust grip and adaptability of active grippers. Additionally, LORIS is designed to be easy and inexpensive to produce, making it a promising development in the field of robotics.
LORIS represents a significant leap forward in robotic climbing technology, offering a versatile and efficient solution for navigating rough and vertical surfaces. This breakthrough has the potential to impact various applications, from search and rescue missions to exploration in challenging environments.